- Инженеры из Сеульского национального университета и Гарвардского университета предложили альтернативную модель управления роем дронов.
- Вместо множества датчиков и алгоритмов ИИ, ученые предложили связать роботов физически в гибкие цепи для синхронного действия.
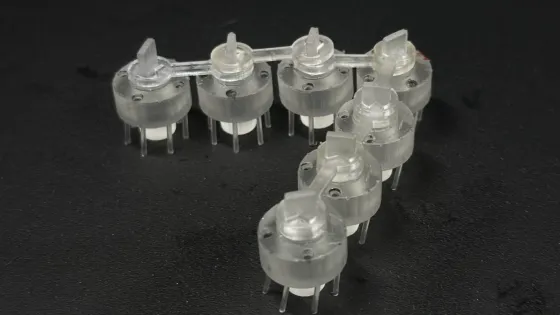
- Роботы организованы в V-образные цепи, где движение каждого звена определяется механическими ограничениями.
- Система может легко адаптироваться к различным задачам и средам, изменяя геометрию звеньев.
- В экспериментах, реалистичное, скоординированное поведение возникло с первых движений.
- Связанные роботы могут протискиваться через узкие щели, блокировать входы и транспортировать объекты.
- Несколько роботов могут работать вместе для выполнения сложных задач.
- Разработана вычислительная модель для расчета влияния различных конструкций цепей и количества частиц на движение.
- Это открывает новые возможности для робототехники в ликвидации последствий стихийных бедствий, логистике и мониторинге окружающей среды.

Робот, состоящий из связанных в цепь независимых элементов. Фото: Seoul National University College of Engineering