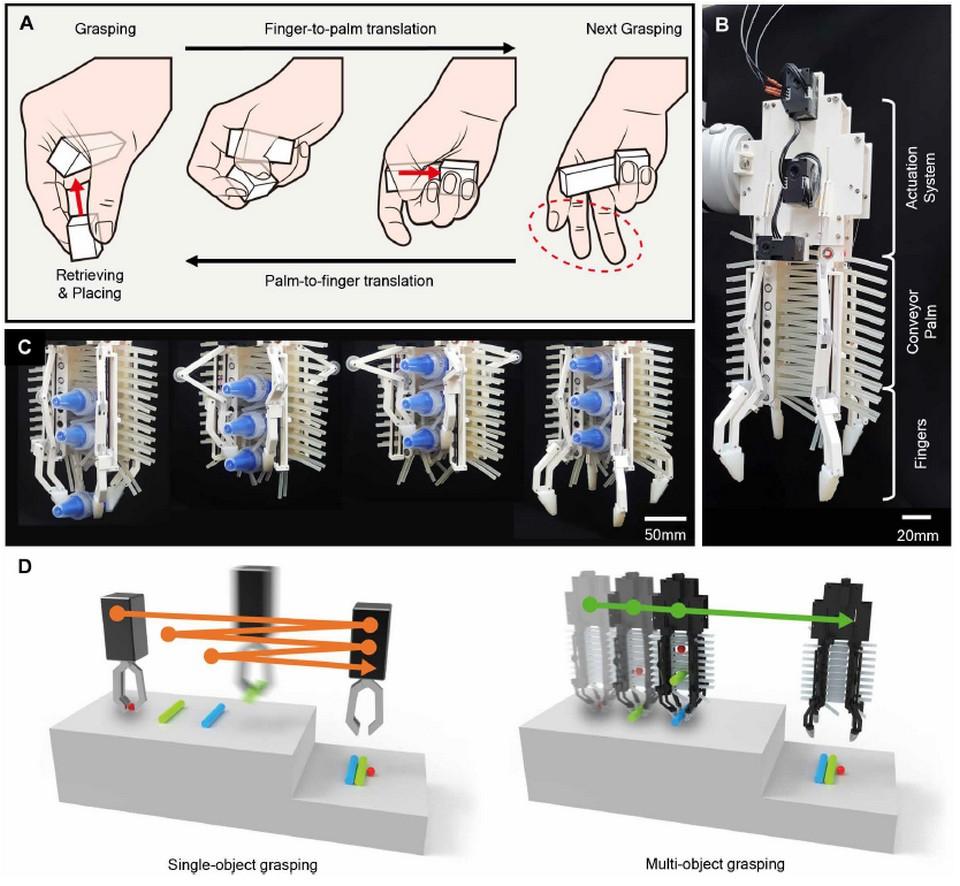
- Корейские инженеры разработали роборуку MoGrip для захвата и перемещения нескольких предметов одновременно.
- MoGrip использует четыре пальца для поочередного захвата предметов и перемещения их в ладонь с эластичными лентами для удержания.
- Конструкция MoGrip сокращает время операций захвата-переноса-размещения на 34% и уменьшает длину траектории манипулятора на 70%.
- MoGrip может захватывать и перемещать до четырех предметов одновременно.
- Инженеры предложили пути для улучшения конструкции, включая добавление датчиков и интеграцию тактильных сенсоров и машинного зрения.
- В будущем планируется добавить возможность вращения пальцев и ладони для работы с объектами в разных ориентациях.