- Американские инженеры разработали миниатюрного шестиногого робота Picotaur массой 15 мг.
- Каждая из его шести ног представляет собой отдельный механизм с двумя степенями свободы.
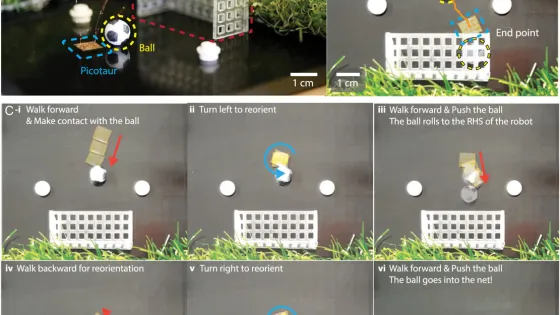
- Picotaur может ходить разными походками, развивать максимальную скорость 7,2 длины тела в секунду, прыгать, менять направление движения, перемещать небольшие грузы и подниматься по лестницам.
- Миниатюрные роботы могут пригодиться для решения ряда практических задач в узких труднодоступных местах.
- Однако при их разработке инженеры сталкиваются с серьезными техническими препятствиями.
- Picotaur оснащен более совершенными ногами для повышения проходимости по сложному рельефу.
- Робот может преодолевать препятствия, приподнимая ноги над поверхностью, и двигаться, подпрыгивая и разворачиваясь на месте.
- В будущем Picotaur планируется дополнить сенсорами восприятия окружающей среды и собственным источником питания для автономной работы.
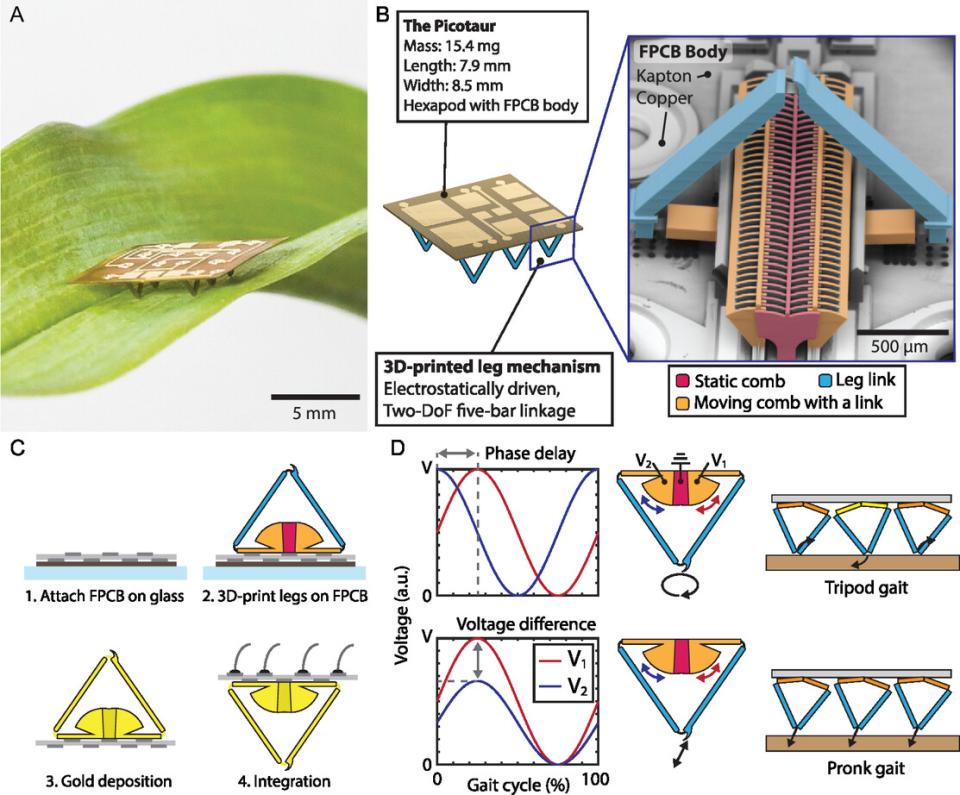 Picotaur: an insect-scale hexapod robot. A) Picotaur on a small leaf. B) A cartoon illustration of Picotaur with an SEM image of the 3D-printed leg mechanism. The micrograph is false-colored to highlight different parts of the mechanism. C) The manufacturing process for Picotaur. D) Input voltage profiles and resulting leg trajectories used in various gait patterns. By adjusting the phase difference and the magnitude of the voltage, the gait pattern can be easily modulated for turning and climbing.
Picotaur: an insect-scale hexapod robot. A) Picotaur on a small leaf. B) A cartoon illustration of Picotaur with an SEM image of the 3D-printed leg mechanism. The micrograph is false-colored to highlight different parts of the mechanism. C) The manufacturing process for Picotaur. D) Input voltage profiles and resulting leg trajectories used in various gait patterns. By adjusting the phase difference and the magnitude of the voltage, the gait pattern can be easily modulated for turning and climbing.
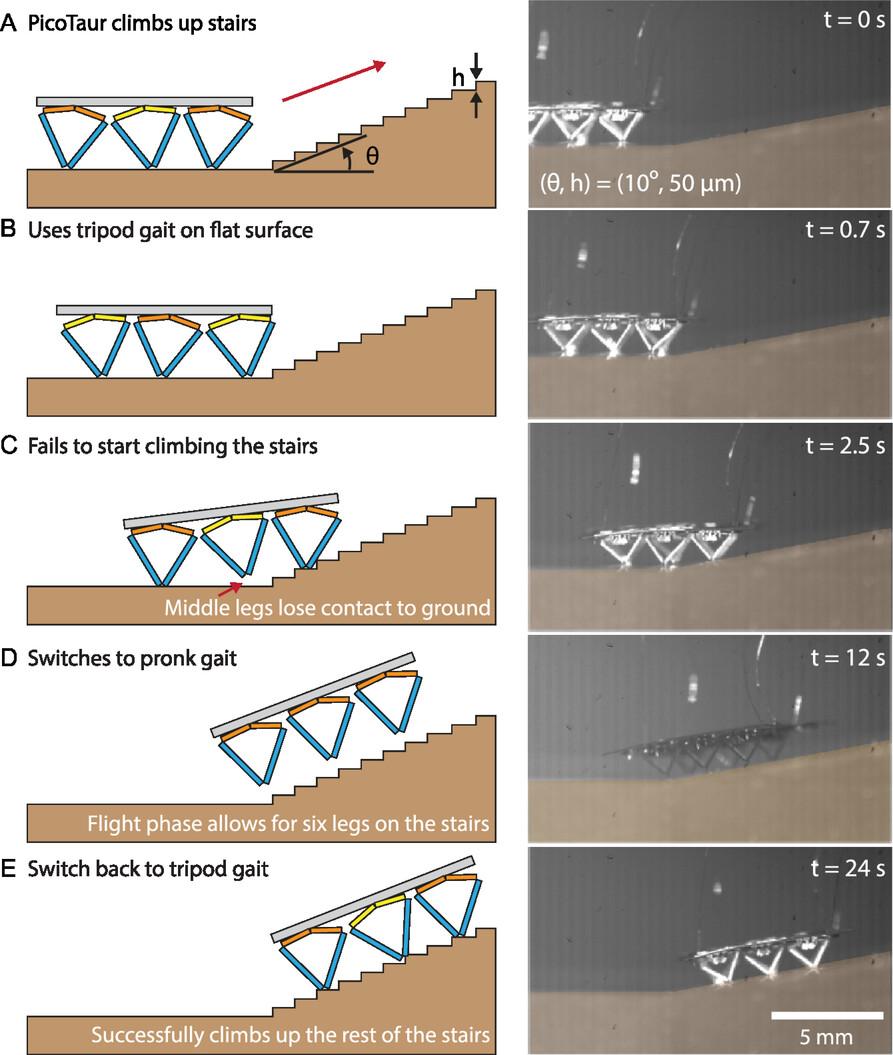 Schematics and experimental results from Picotaur climbing up stairs by switching gait patterns. A) The robot starts to climb up the stairs. The slope angle and stair height are (θ, h) = (10°, 50 μm). B) The robot used a tripod gait while on the flat surface. C) The robot failed to climb stairs with the tripod gait since the middle legs cannot make proper contact with the ground. D) The robot switched gaits to the pronk gait to achieve a flight phase that results in all six legs on the stairs. E) The robot switched back to a tripod gait to climb the rest of the stairs.
Schematics and experimental results from Picotaur climbing up stairs by switching gait patterns. A) The robot starts to climb up the stairs. The slope angle and stair height are (θ, h) = (10°, 50 μm). B) The robot used a tripod gait while on the flat surface. C) The robot failed to climb stairs with the tripod gait since the middle legs cannot make proper contact with the ground. D) The robot switched gaits to the pronk gait to achieve a flight phase that results in all six legs on the stairs. E) The robot switched back to a tripod gait to climb the rest of the stairs.