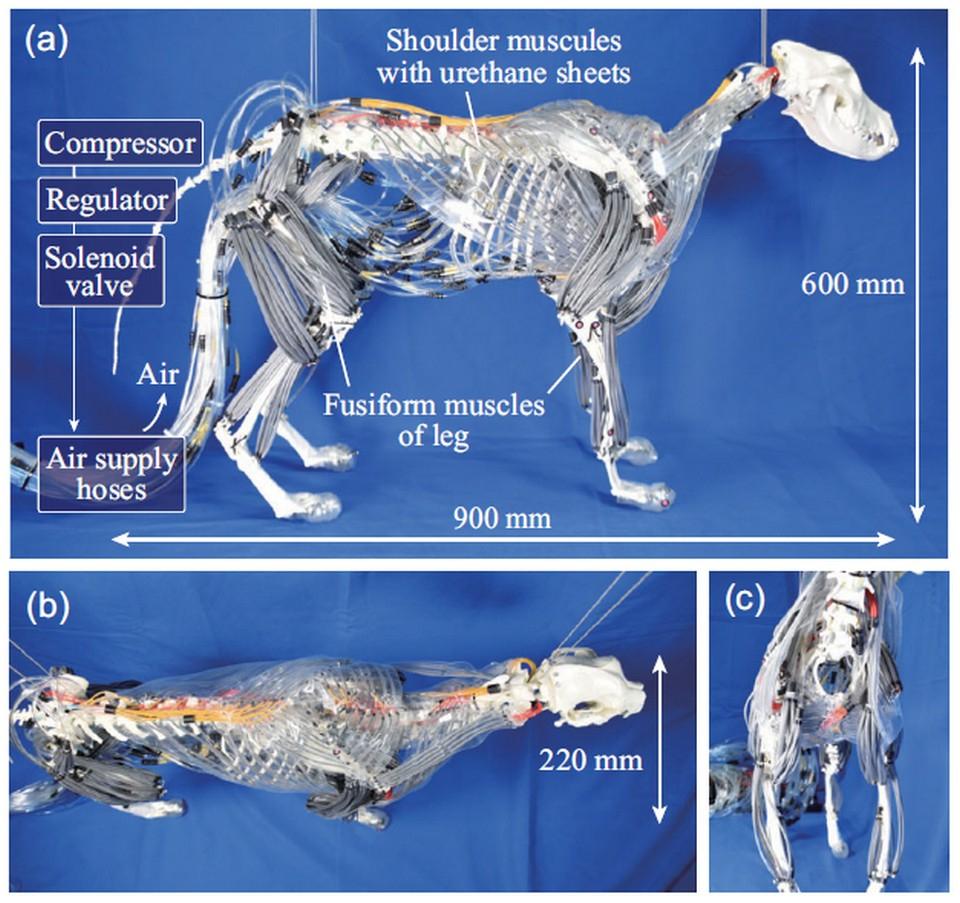
- Японские инженеры создали робопса с пневматическими мышцами, который анатомически точно воспроизводит строение тела собаки.
- Вместо электромоторов в роботе используются гибкие пневматические искусственные мышцы Маккиббена.
- Прототип успешно продемонстрировал стабильную ходьбу по прямой.
- Большинство современных четвероногих роботов используют электромоторы в плечевых суставах.
- Разработка роботов, имитирующих систему мышц, сухожилий и связок биологических прототипов, может помочь в исследованиях двигательных возможностей реальных животных.
- Авторы планируют сосредоточиться на реализации ходьбы без тележки и оптимизации пневматической системы.
 Hana Ito et al. / Advanced Robotics Research, 2025
Hana Ito et al. / Advanced Robotics Research, 2025