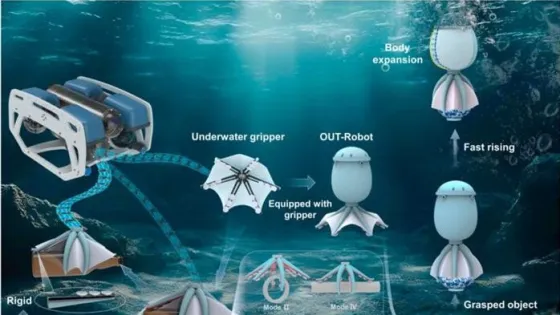
- Разработан подводный захват Octopus-Inspired Upward Transport Robot (OUT-Robot), имитирующий мультимодальную стратегию захвата осьминога.
- Устройство использует полимер с памятью формы (ППФ) - полимолочную кислоту (ПМК) - в сочетании с трехслойным термоинтерфейсом для быстрой смены жесткости.
- Захват обеспечивает потрясающую скорость: размягчается всего за 1,3 секунды при подаче напряжения и затвердевает за 0,8 секунды после прекращения нагрева.
- Манипулятивный подход «мягко-жесткий гибрид» позволяет захвату идеально прилегать к неровным поверхностям и удерживать тяжелые предметы без постоянного подвода энергии.
- Результаты экспериментов подтверждают значительное улучшение жесткости и силы захвата.
- OUT-Robot сочетает в себе активный контроль плавучести и манипулирование, снижая общее энергопотребление и позволяя роботу двигаться под водой во всех направлениях.
- Технология открывает возможности для автономных морских операций, восстановления экосистем и океанических миссий.
«Мы создали термодинамическую синергию между материалом, геометрией и подводной средой», — объясняет профессор Се. «Внутренний силиконовый слой равномерно распределяет тепло, внешний слой служит временным барьером при нагревании, а окружающая вода становится активным теплоотводом при охлаждении».