- Инженеры из Disney и ETH Zurich разработали метод обучения нейросетевого алгоритма для управления движениями трехмерных персонажей и роботов.
- Метод использует двухэтапный процесс обучения: создание внутреннего представления о базовых движениях и обучение политики управления.
- Такой подход обеспечивает реалистичное и плавное выполнение движений, адаптируясь к физическим ограничениям.
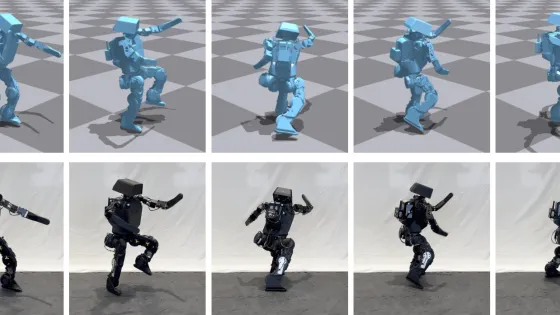
- Алгоритм успешно протестировали на виртуальном персонаже и человекоподобном роботе.
- Метод состоит из двух этапов: обучение вариационного автоэнкодера и обучение нейросетевой политики с помощью метода обучения с подкреплением.
- Полученная политика управления принимает на вход данные о движении и превращает их в команды управления суставами с учетом физики и ограничений движения.
- Модель оказалась не подвержена коллапсу моды и способна корректно воспроизводить незнакомые последовательности движений.
- Метод успешно протестировали на виртуальном персонаже с 36 степенями свободы и человекоподобном роботе LIME с 20 степенями свободы.э
