- Японские инженеры создали четвероногого робота KLEIYN, который умеет карабкаться между двумя вертикальными стенами враспор.
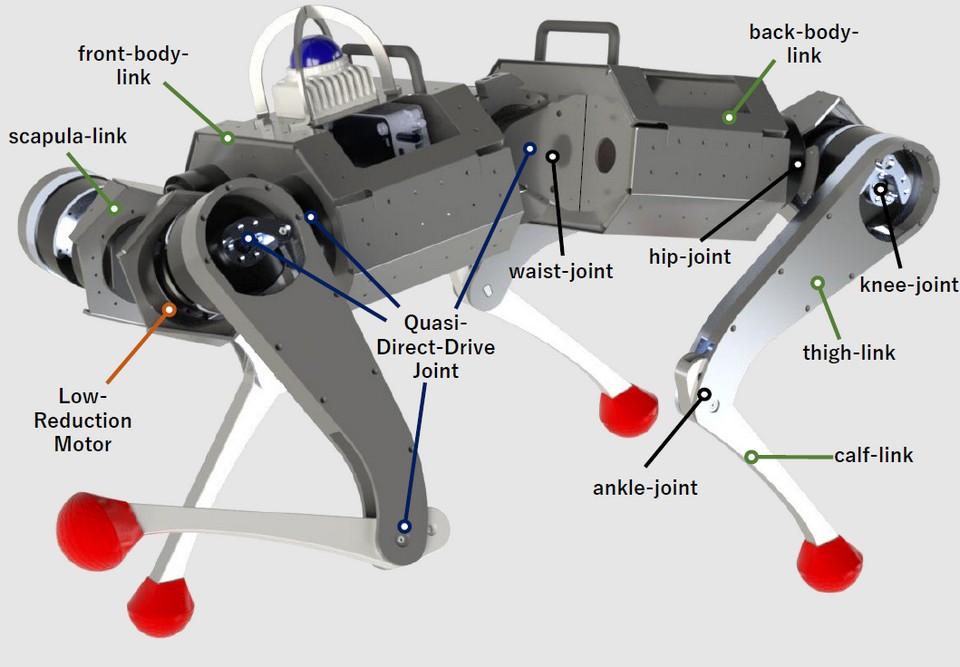
- В его корпусе находится дополнительный активный сустав, который выполняет роль позвоночника и позволяет лучше упираться ногами в стены.
- Робот успешно взбирался между стенами с шириной зазора от 80 до 100 сантиметров со средней скоростью 150 миллиметров в секунду.
- KLEIYN создан на базе робособаки с открытой архитектурой MEVIUS, разработанной инженерами Токийского университета.
- Ключевое отличие от оригинала - корпус, который у KLEIYN разделен на две половины, соединенные между собой шарниром с электроприводом.
- Масса робота составляет 18 килограмм.
- Для создания алгоритма управления разработчики применили обучение с подкреплением.