
- Инженеры разработали прыгающего робота, способного приземляться на узкие поверхности.
- Технология основана на биомеханике прыжков белок.
- Роботы-белки могут перемещаться в сложных средах, таких как кроны деревьев и строительные конструкции.
- Для изучения механики приземления белок использовались датчики на ветке.
- Анализ показал, что белки используют стойку на передних лапах для приземления и регулируют тормозное усилие.
- Инженеры применили полученные знания для модификации робота Salto, добавив метод реверсирования двигателя и регулируемые силы ног.
- Модифицированный Salto успешно приземлялся на ветку и удерживал равновесие.
- Конструкция с пассивным захватом и низким трением использовалась для проверки эффективности новых алгоритмов балансировки.
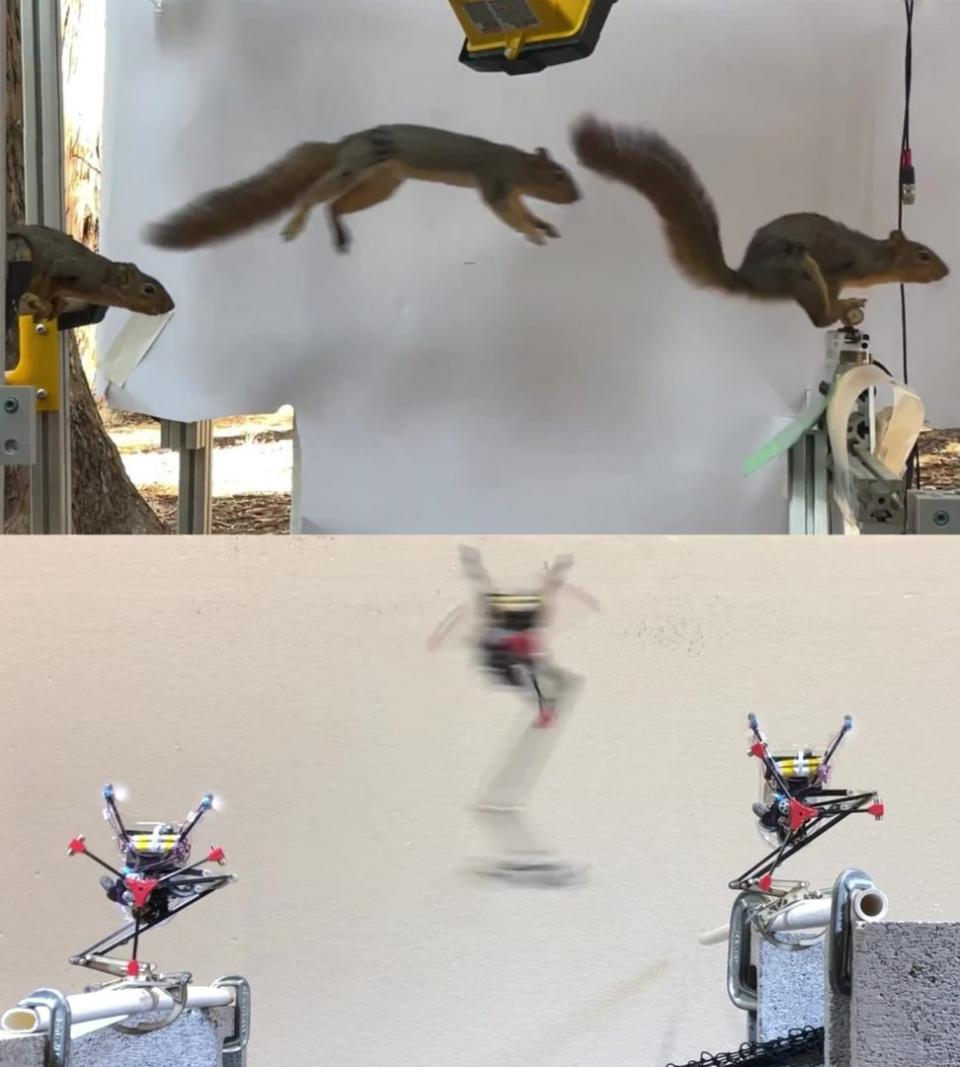 Белка прыгает с насеста на ветку, а одноногий робот Salto следует его примеру. Изображение: Sebastian Lee (сверху) and Justin Yim (снизу), UC Berkeley
Белка прыгает с насеста на ветку, а одноногий робот Salto следует его примеру. Изображение: Sebastian Lee (сверху) and Justin Yim (снизу), UC Berkeley
