
- Китайские инженеры создали диэлектрические эластомерные актуаторы для мягких роботов.
- Актуаторы состоят из тонкой пленки эластомера между двумя мягкими электродами.
- При подаче напряжения электростатическая сила сжимает пленку, создавая механическое усилие.
- Актуаторы обладают большими деформациями, высокой плотностью энергии и быстрым откликом.
- Для работы актуаторов обычно требуется напряжение порядка нескольких киловольт.
- Инженеры из Чжэцзянского университета применили четыре стратегии для снижения рабочего напряжения.
- Полученный эластомер HK-PHDE показал диэлектрическую проницаемость около 13 и модуль Юнга 0,56 мегапаскаля.
- Инженеры собрали из пленок HK-PHDE многослойные актуаторы методом сухого ламинирования.
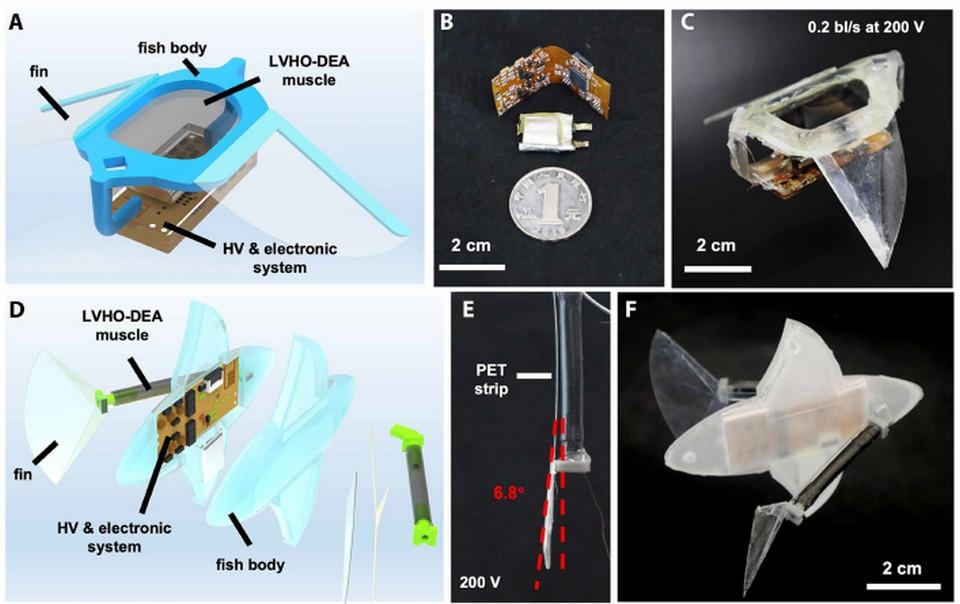 (A) Схема робота-манты с плоским актуатором LVHO-DEA. (B) Фотография электронной платы (сверху), аккумулятора (посередине) и монеты в один юань (снизу) для масштаба. (C) Фотография собранного робота-манты. (D) Схема автономного мягкого робота в форме луны-рыбы с цилиндрическими актуаторами, работающими в режиме изгиба. (E) Цилиндрический актуатор LVHO-DEA с пассивной полоской, изгибающийся при 200 вольтах. (F) Фотография собранного автономного мягкого робота в форме луны-рыбы
Junbo Peng et al. / Science Robotics, 2026
(A) Схема робота-манты с плоским актуатором LVHO-DEA. (B) Фотография электронной платы (сверху), аккумулятора (посередине) и монеты в один юань (снизу) для масштаба. (C) Фотография собранного робота-манты. (D) Схема автономного мягкого робота в форме луны-рыбы с цилиндрическими актуаторами, работающими в режиме изгиба. (E) Цилиндрический актуатор LVHO-DEA с пассивной полоской, изгибающийся при 200 вольтах. (F) Фотография собранного автономного мягкого робота в форме луны-рыбы
Junbo Peng et al. / Science Robotics, 2026