- Японские инженеры создали миниатюрного четвероногого шагохода с живыми мышцами.
- Шагоход управляется светом и развивает скорость 3,6 мм/мин.
- Миниатюризация роботов требует новых типов актуаторов, таких как биогибридные роботы с искусственно выращенными мышцами.
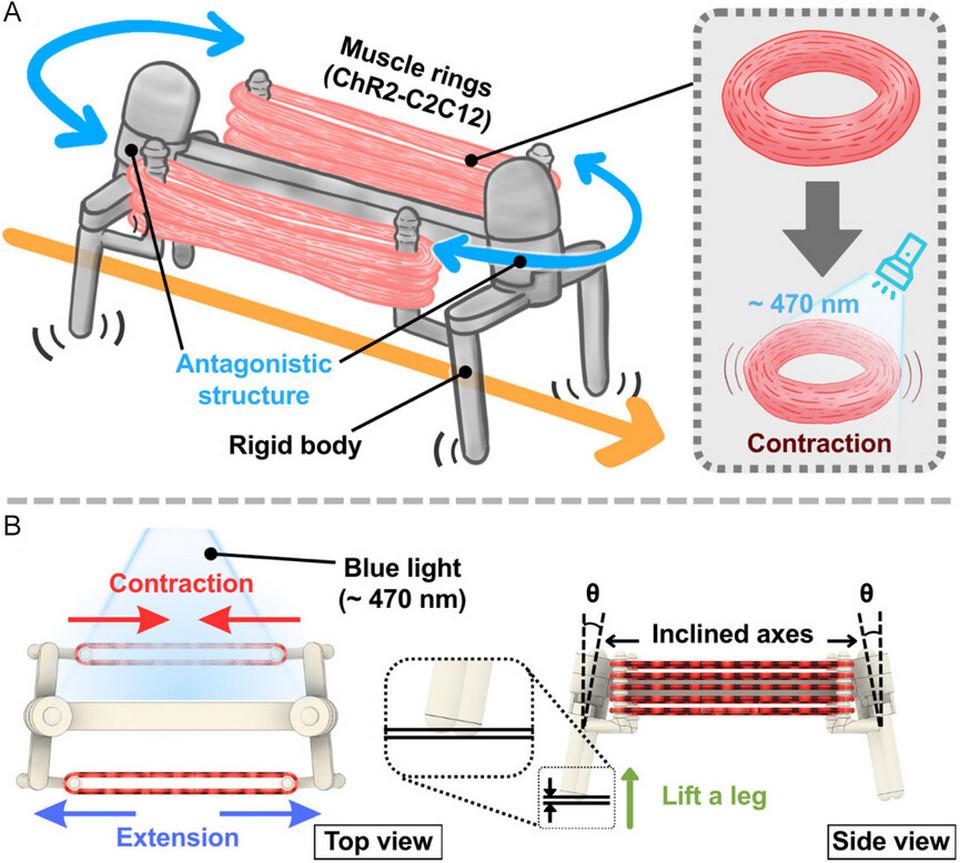
- Оптогенетический подход позволяет активировать мышечные клетки бесконтактно и без повреждения тканей.
- Инженеры создали несколько типов биогибридных роботов, но большинство из них не могут полноценно ходить.
- Новый робот имеет жесткий корпус с суставами и использует оптогенетически модифицированные мышечные ткани для движения.
- Разработчики планируют масштабировать архитектуру робота и интегрировать микро-светодиоды для автономной стимуляции.
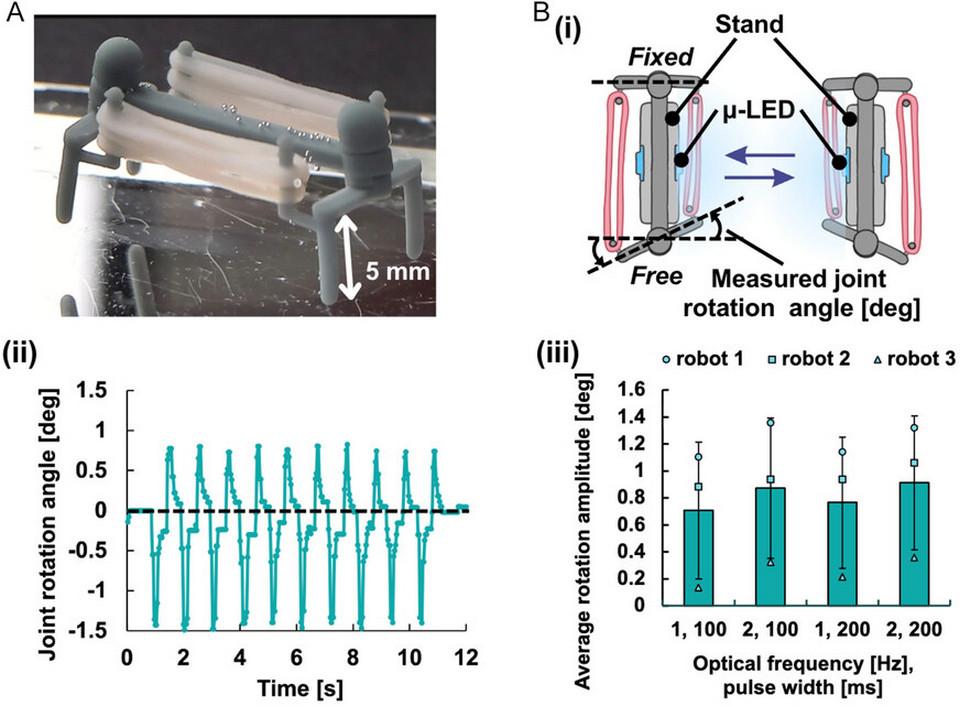 A) Полностью собранный четвероногий шагающий биогибридный робот в питательной среде. (B(i)) Схема метода измерения угла. (B(ii)) Изменение угла вращения сустава (1 герц, 100 миллисекунд, одно мышечное кольцо на сторону). (B(iii)) Средние изменения угла вращения сустава при различных частотах стимуляции и длительностях импульса (одно кольцо на сторону), измеренные на трех роботах (роботы 1–3), каждый из которых приводился в движение отдельной антагонистической парой мышечных колец, изготовленных в одной партии.
Shotaro Saito et al. / Advanced Robotics Research, 2026
A) Полностью собранный четвероногий шагающий биогибридный робот в питательной среде. (B(i)) Схема метода измерения угла. (B(ii)) Изменение угла вращения сустава (1 герц, 100 миллисекунд, одно мышечное кольцо на сторону). (B(iii)) Средние изменения угла вращения сустава при различных частотах стимуляции и длительностях импульса (одно кольцо на сторону), измеренные на трех роботах (роботы 1–3), каждый из которых приводился в движение отдельной антагонистической парой мышечных колец, изготовленных в одной партии.
Shotaro Saito et al. / Advanced Robotics Research, 2026