- Робототехники разработали новый захват для манипулирования объектами.
- Захват имеет пять степеней свободы и прост в использовании.
- Сенсорные данные записываются встроенным визуально-тактильным датчиком.
- Захват состоит из двух пальцев, изготовленных методом 3D-печати.
- В кончике левого пальца расположен тактильный и визуальный датчик GelSight Mini.
- Захват превосходит базовые навыки манипулирования простых захватов.
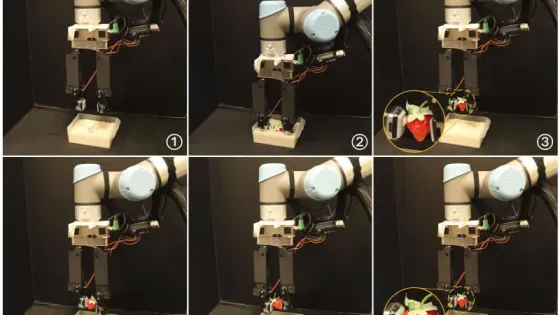
- Захват может выполнять отделение и зачерпывание объектов.
- Роботизированный захват совершенствуют для манипулирования мягкими предметами.
Двух пальцев достаточно: упрощённый роботизированный захват оказался не хуже аналога кисти
20 авг 2024
Краткий пересказ
от нейросети YandexGPT
Источник:
vsluh.net