- Дистанционно управляемые роботы для сбора лунной пыли стали ближе благодаря новому исследованию ученых из Бристольского университета.
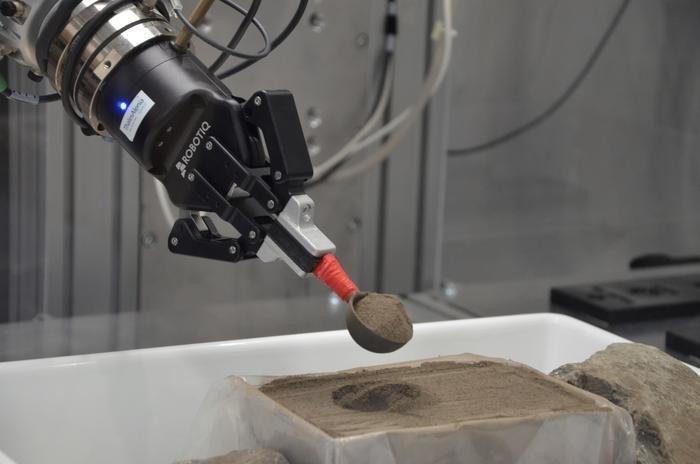
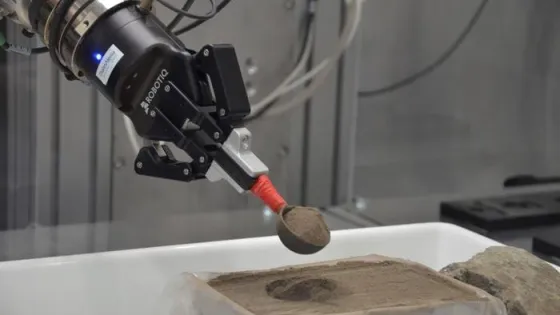
- Команда смогла выполнить задачу по сбору образцов, управляя виртуальной симуляцией и отправляя команды физическому роботу.
- Ученые смогли наблюдать за симуляцией без использования физических камер, что делает инструмент полезным для удаленного управления роботом на Луне.
- Дистанционная обработка реголита является важным шагом в добыче ресурсов, таких как кислород и вода, из лунного реголита.
- Виртуальная модель реголита может помочь астронавтам подготовиться к миссиям на Луне и управлять лунными роботами дистанционно.
- Использование виртуальной модели реголита может снизить барьеры для разработки лунных роботов и снизить стоимость симуляторов.
- В ближайшее десятилетие ожидаются полеты на Луну с экипажем и без, и эта модель может стать ценным инструментом для подготовки и работы этих миссий.