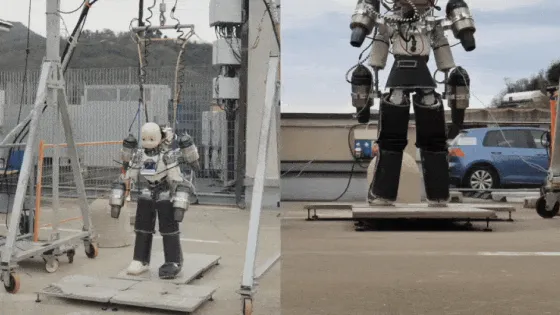
- Итальянские инженеры успешно провели первые летные испытания человекоподобного робота iRonCub 3 с четырьмя турбореактивными двигателями.
- Робот оторвался от земли и завис на высоте 50 см на несколько секунд.
- Полетом управляет многоуровневая система, оценивающая положение робота в пространстве и контролирующая тягу двигателей и движения суставов.
- Робот iRonCub-Mk3 основан на человекоподобном роботе iCub3 и оснащен четырьмя миниатюрными турбореактивными двигателями JetCat P250 Pro.
- Инженеры заменили позвоночник робота на титановый и покрыли ноги термостойким аэрогелем для выдерживания нагрузок и температуры реактивной струи.
- Разработан многоуровневый алгоритм управления полетом с использованием фильтра Калмана, IMU-сенсора и камеры глубины.
- Инженеры провели исследование аэродинамики робота и создали цифровую модель для обучения нейросети.
- В будущем планируется улучшить систему оценки состояния, математическую модель реактивных двигателей и контроллер для выполнения маневров в реальных условиях.
Человекоподобный робот с джетпаком совершил первый полет
1 июл 2025
Краткий пересказ
от нейросети YandexGPT
Обложка: Изображение из статьи. Artificial and Mechanical Intelligence / YouTube