- Китайские инженеры разработали систему управления для человекоподобных роботов, позволяющую им адаптироваться к окружающей среде.
- Система объединяет данные с камеры глубины и датчиков тела для планирования движений с учетом геометрии препятствий.
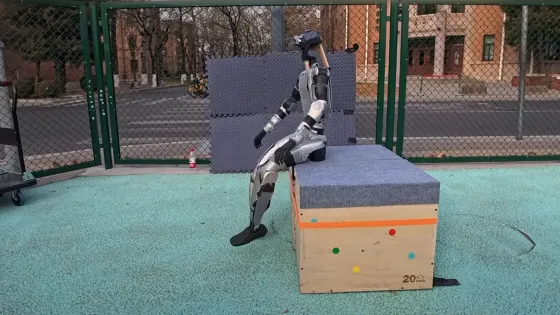
- Робот Unitree G1 успешно выполнил кувырки через барьер и перебрался через препятствия с помощью рук и тела.
- Современные методы управления человекоподобными роботами делятся на ходьбу с использованием восприятия и имитацию движений.
- Разработанная система управления позволяет роботам выполнять акробатические трюки с использованием всего тела.
- Обучение нейросети проводилось в симуляторе Isaac Gym с использованием метода обучения с подкреплением и алгоритма proximal policy optimization.
- Готовую систему проверили на андроиде Unitree G1 с камерой Intel RealSense, робот выполнил четыре типа движений.
- Тесты подтвердили успешную адаптацию робота к условиям улицы и визуальным помехам, а также его способность изменять длину шага для точного попадания на край препятствия.
Андроид Unitree G1 выполнил прыжок через барьер с кульбитом
13 фев 2026
Краткий пересказ
от нейросети YandexGPT