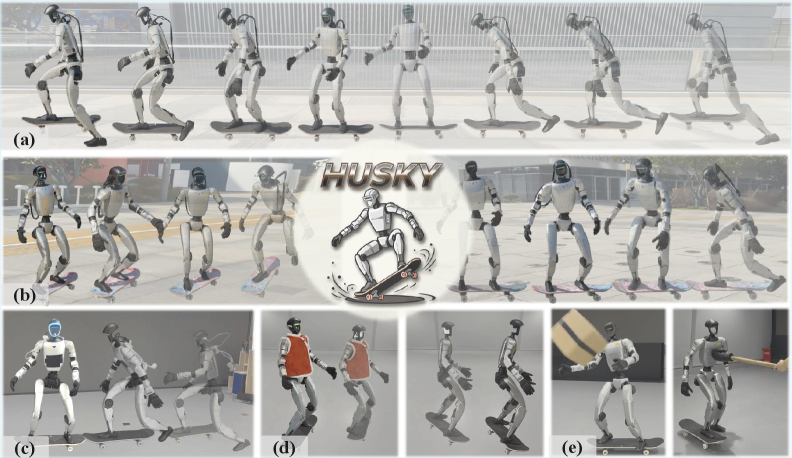
- Китайский робот Unitree G1 обучен катанию на скейтборде с использованием алгоритма HUSKY.
- Обучение основано на модели физики скейтборда и подкреплении.
- Робот может отталкиваться, набирать скорость, поворачивать и сохранять равновесие.
- HUSKY использует три компонента: отталкивание, руление и переход.
- Для фазы разгона используется метод Adversarial Motion Priors для имитации движений человека.
- Фаза руления основана на физической модели скейтборда с системой поворота за счет кренов.
- В фазе перехода используются плавные кривые Безье для ключевых точек тела робота.
- Обучение проводилось с использованием алгоритма Proximal Policy Optimization в симуляторе Isaac Gym.
- Система HUSKY продемонстрировала хорошие результаты на реальном роботе Unitree G1.