- Инженеры из Японии и Франции создали пневматические стопы для гуманоидного робота.
- Стопы могут менять жесткость в зависимости от типа поверхности в реальном времени.
- Робот может подстраиваться под рельеф благодаря пневматическим стопам.
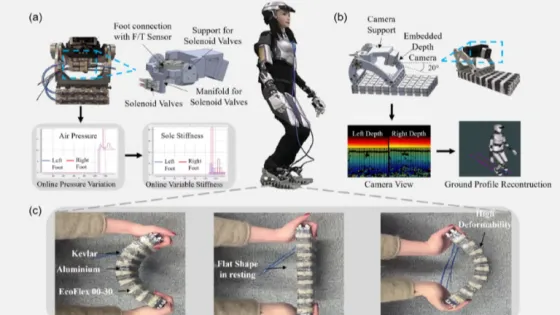
- Инженеры использовали камеру глубины Intel RealSense для распознавания рельефа.
- Адаптивные стопы показали лучшие результаты по сравнению с жесткими стопами и пассивными мягкими стопами.
- Система успешно преодолевает препятствия высотой до 25 мм и показывает на 70% более высокий уровень успеха на сложных маршрутах.
- Система пока протестирована только в лабораторных условиях и требует доработки.
- В будущем планируется добавить тактильную обратную связь для корректировки жесткости ступней.
Андроид научился на ходу менять жесткость стоп
2 мар 2026
Краткий пересказ
от нейросети YandexGPT
Обложка: Изображение из статьи. Пневматическая система, электромагнитные клапаны и соединение со стопой для регулирования давления в реальном времен