- Миниатюрные роботы размером с насекомых могут проникать в труднодоступные места, например, в обрушившиеся здания.
- Воздушные роботы могут избегать препятствий, но требуют много энергии и имеют ограниченное расстояние.
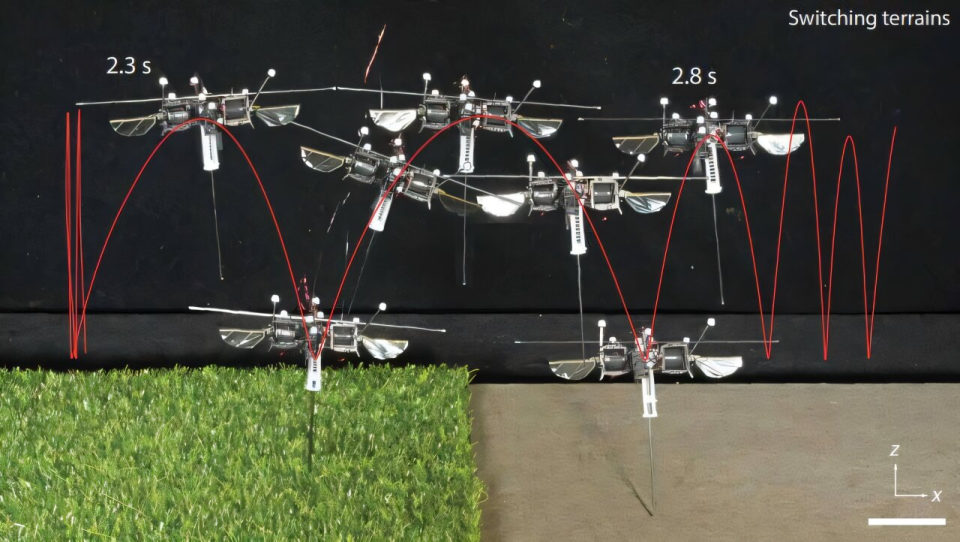
- MIT-робот объединяет преимущества обоих способов передвижения: прыжки с высокой энергоэффективностью и машущие крылья для контроля ориентации.
- Робот может прыгать на высоту до 20 см и преодолевать различные поверхности, потребляя на 60% меньше энергии, чем летающий робот.
- Робот может нести полезную нагрузку в 10 раз больше своего веса, что открывает множество новых применений.
- Прыжки насекомых являются примером энергоэффективности, и MIT-робот использует аналогичный принцип для преобразования потенциальной энергии в кинетическую.
- Робот оснащен упругой ногой и машущими крыльями для компенсации потери энергии при контакте с землей.
- Система управления робота использует внешнюю систему трекинга движения и алгоритм для расчета параметров прыжка на основе данных сенсоров.
«Если бы наша пружина была идеальной, робот мог бы просто прыгать бесконечно, без потери энергии. Но поскольку она не идеальна, мы используем машущие модули, чтобы компенсировать потерю энергии при каждом контакте с землёй», объясняет Хсяо.